Sem produtos





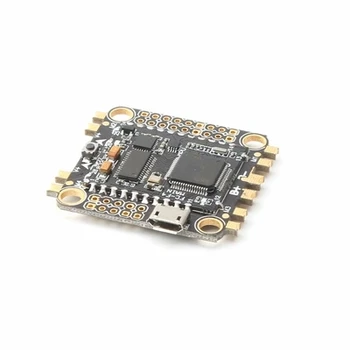
F4 Controle de Vôo F4 PDB STM32 Integrado OSD 5V BEC Controlador de Vôo para Réptil Marciano II 220mm QAV-X 214 Drone
R$100.77
Novo produto
Disponível
Etiquetas: 3670 o motor sem escova, conselho de controle de, pdb xt60, quadro marciano, stm32 tábua de engomar, fpv pdb, m62 rc drone, 2838 motor, marciano, f4.
Este é um uso de STM32F405 com MPU6000 mainstream FPV pequeno chassis com controle de vôo, tensão de entrada 2-6, BEC-saída 5V vem com 3A atual, para apoiar o mercado mainstream PPM, SBUS, o IBUS, DSM2 / DSMX e assim por diante máquina.LED_STRIP interface, active campainha de interface.Integrado OSD função, suporte OSD parâmetros, suporte para o mais recente DSHOT ESC.Padrão de fábrica firmware: betaflight_3.2.0_OMNIBUSF4SD Configuração de Hardware: Mestre: STM32F405RGT6 Sensor:MPU6000 Receptor: Suporte PPM, SBUS, o IBUS, DSM2 / DSMX e assim por diante LED_STRIP interface Ativa campainha interface Sem a caixa preta Built-in amperímetro, a corrente de detecção de OSD com interface Vem com BEC 5V 3A dimensões 42 * 36MM (incluindo a ligação de fios almofada de comprimento) orifício com Rosca para o espaçamento de 30,5 * 30,5 MM de Diâmetro de 4,1 MM Peso 9.3 gramas Nota: Como antes, muitos clientes refletir que o conselho tem instável shake problemas com ICM20608 sensor, então agora vamos usar MAIS Estável chip MPU6000 no conselho de administração.Nova F4 de controle de vôo: 1. Usando OMNIBUSF4 firmware 2. Mestre STM32F405 GRT6 taxa de atualização de até 8K. 3.PCB 3 OZ espessura de cobre para melhorar a atual estabilidade e resfriamento rápido 4.BEC 5V3A de saída 5. Expostas as pastilhas fácil de solda e descartar tradicionais quadros de distribuição. 6 compatível com todas as ESC de mercado 7. De Controle de voo IMU integrado OSD sem escovar independente de firmware, suporte BF estação de chão de referência OSD 8. Integrado galvanômetro, o monitoramento em tempo real de corrente consumo de energia e outros dados 9. Você pode usar o controle remoto para ajustar o OSD de dados, tais como controle de vôo PID 10. A portas abertas pode ser ajustado a partir do menu OSD mapa, tais como alimentação, frequência de banda de frequência (suporte para a função de mapa, tais como a Ovelha Negra Lenda, e o próximo DIS mapa) 11.F4 controle de vôo independentes quatro amortecimento da bola, pode-se filtrar a vibração do motor, de modo que a experiência de voo melhor ESC M1-M4: Ligar o cabo de alimentação V + -V-: correspondente a ESC linha de alimentação positiva e negativa, com '-' para o chão.B + - B-: bateria de Lítio de entrada de INICIALIZAÇÃO: INICIALIZAR o botão (usado como pincel de firmware) +5 V: Com 3A saída, pode ser ligado à imagem, receptor, máquina fotográfica.TERRA: Terra Vout: saída de vídeo, em seguida, a imagem de transmissão de sinal de imagem da linha de Vin: entrada de vídeo e, em seguida, câmara cabo de sinal do DIODO emissor de luz: Programável LED_Strip sinal de saída de linha de RX6 (S): Conexão SBUS receptor aqui RX1 (D): Ligar DSM2 / DSMX / IBUS receptor aqui PPM: Aqui PPM receptor VBAT: Largo da tensão de imagem positiva da fonte de alimentação (com tensão de bateria de sincronização), onde a tensão é a tensão de alimentação BUZ +, BUZ-: BB anel da linha (só oferece suporte a active campainha, distinguir entre o positivo e o negativo) RX3, TX3: porta Serial URAT3 1 X Omnibus F4 PDB de Controle de Vôo 4 x Anti-vibração de Borracha Bola
| Controle Remoto Periféricos/Dispositivos | Receptores |
| Material | Material Composto |
| Quatro rodas Atributos | Assemblage |
| Utilização | Veículos E Brinquedos De Controle Remoto |
| Parâmetros técnicos | Valor 2 |
| Distância entre eixos | Placa De Fundo |
| RC Peças e Accs | Componentes Do Motor |
| Atualização De Peças/Acessórios | Adaptador |
| Nome Da Marca | GTSKYTENRC |
| Ferramenta De Suprimentos | Corte |
| Para O Tipo De Veículo | Aviões |
Sem avaliações neste momento.















